SCUV – Krokový regulátor s rychlostním výstupem
Symbol blokuPotřebná licence: STANDARD

Popis funkce
Blok SCUV nahrazuje polohový regulátor SCU v úplné regulační smyčce s
třístavovým krokovým regulátorem, jestliže polohový signál servoventilu není
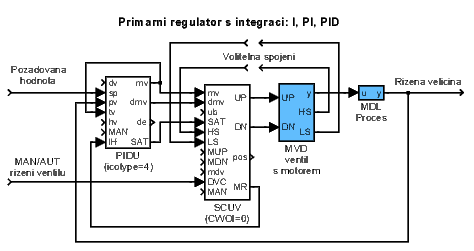
dostupný anebo dostatečně spolehlivý. Nadřazený regulátor PIDU
(nebo odvozený) je propojen s blokem SCUV signály mv, dmv a SAT (výstupy bloku
PIDU a vstupy bloku SCUV).
Jestliže je nadřazený regulátor typu PI nebo PID (CWOI=off), potom jsou všechny tři vstupy mv, dmv a SAT bloku SCUV zpracovávány speciálním integračním algoritmem a symetrickým třístavovým algoritmem s parametry (práhy) thron a throff (viz blok TSE, uvažujte parametry ep=thron, epoff=throff, en=-thron a enoff=-throff). Vzniklé pulsy (více, méně) jsou dále upravovány tak, že délka libovolného generovaného pulsu (UP, DN) na výstupu bloku je alespoň dtime a prodleva mezi dvěma po sobě jdoucími pulsy opačné polarity je alespoň btime. Parametr RACT určuje směr otáčení motoru. Poznamenejme, že nadřazený regulátor PIDU musí mít nastavení icotype=4. Blok SCUV rekonstruuje rychlostní výstup nadřazeného regulátoru ze vstupů mv a dmv. Navíc, jestliže regulační odchylka nadřazeného regulátoru je menší než pásmo necitlivosti (SAT=on), potom je výstup vnitřního integrátoru bloku SCUV nulován. Takto je dosaženo klidu servoventilu při dostatečně malé regulační odchylce nadřazeného regulátoru (|de|<dz – viz popis bloku PIDU).
Poloha servoventilu pos je odhadována dalším vnitřním integrátorem s časovou konstantou trun. Jsou-li dostupné signály od koncových spínačů servoventilu, potom by měly být připojeny na vstupy HS (horní spínač) a LS (dolní spínač).
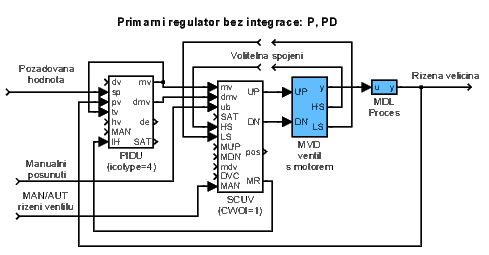
Jestiže je nadřazený regulátor typu P nebo PD (CWOI=on), potom může být regulační odchylka nadřazeného regulátoru manuálně odstraněna vhodným nastavením vstupu ub. V tomto případě je řídicí algoritmus bloku SCUV) lehce modifikován. Je užita rekonstruovaná hodnota polohy servoventilu pos a parametry thron, throff a tt musí být pečlivě nastaveny pro potlačení střídání pulsů více a méně v ustáleném stavu.
K dispozici je také sada vstupů pro manuální ovládání. Přepnutí do manuálního režimu je možné pomocí vstupu MAN=on, pak lze s motorem pohybovat tam a zpět pomocí signálů MUP a MDN, eventuelně lze pomocí vstupu mdv nastavit, o kolik se má změnit poloha motoru, a tento požadavek potvrdit náběžnou hranou (off→on) na vstupu DVC.
Celková funkce bloku SCUV je zřejmá z následujícího diagramu:
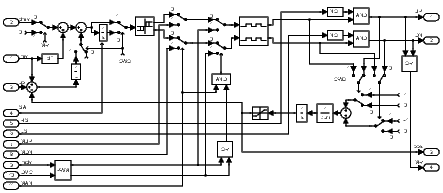
Úplné třístavové krokové regulátory bez polohové zpětné vazby jsou zobrazeny na následujících obrázcích:
Vstupy
mv | Akční zásah regulátoru (manipulated variable) | Double (F64) |
dmv | Rychlostní výstup regulátoru (diference) | Double (F64) |
ub | Posunutí (jen pokud je primární regulátor typu P nebo PD) | Double (F64) |
SAT | Nulování interního integrátoru (propojen s výstupem SAT primárního regulátoru) | Bool |
HS | Horní koncový spínač (příznak, že poloha ventilu je na horní mezi) | Bool |
LS | Dolní koncový spínač (příznak, že poloha ventilu je na spodní mezi) | Bool |
MUP | Manuální povel UP (nahoru, přidej) | Bool |
MDN | Manuální povel DN (dolů, uber) | Bool |
mdv | Ruční diferenční hodnota (požadovaný přírůstek/úbytek polohy, mající vyšší prioritu než přímé signály MUP/MDN) | Double (F64) |
DVC | Přijetí ruční diferenční hodnoty off→on | Bool |
MAN | Manuální nebo automatický režim | Bool |
|
|
|
Výstupy
UP | Signál UP (nahoru, více) | Bool |
DN | Signál DN (dolů, méně) | Bool |
pos | Simulovaná poloha motoru | Double (F64) |
MR | Požadavek na běh motoru | Bool |
|
|
|
Parametry
thron | Mez pro zapnutí ↓0.0 ⊙0.02 | Double (F64) |
throff | Mez pro vypnutí ↓0.0 ⊙0.01 | Double (F64) |
dtime | Minimální trvání výstupního pulzu [s] ↓0.0 ⊙0.1 | Double (F64) |
btime | Minimální prodleva mezi dvěma následujícími pulzy [s] ↓0.0 ⊙0.1 | Double (F64) |
RACT | Převrácené působení výstupu regulátoru | Bool |
|
|
|
trun | Časová konstanta motoru (určuje dobu, za kterou se motor posune o hodnotu jedna) ↓0.0 ⊙10.0 | Double (F64) |
CWOI | Regulátor bez integrační složky | Bool |
|
|
|
tt | Časová konstanta vysledování ↓0.0 ⊙1.0 | Double (F64) |
[Předchozí] [Na začátek] [Výše] [Další]
2020 © REX Controls s.r.o., www.rexygen.com