ZV4IS – Tvarovač vstupního signálu pro potlačení vibrací
Symbol blokuPotřebná licence: ADVANCED

Popis funkce
Blok ZV4IS realizuje funkci frekvenčního filtru typu pásmová zádrž. Hlavní oblastí
použití je řízení pohybu mechanických systémů s pružnými částmi, kde vlivem
nedostatečné tuhosti konstrukce hrozí nebezpečí vzniku reziduálních vibrací. Ty se
projevují jako mechanické chvění vybuzené v důsledku momentu nebo síly, kterou
aktuátory působí na pracovní mechanismus stroje. Tyto vibrace mohou mít negativní
vliv na přesnost regulace, vedou ke zvýšenému opotřebení mechanických
částí stroje a v krajním případě mohou způsobit nestabilitu regulačních
smyček. Obecně lze tvarovací filtr využít v libovolné aplikaci pro řízení
kmitavých systémů nebo pro potlačení konkrétní frekvence ve spojitém
signálu.
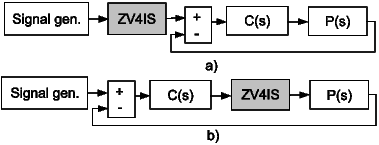
Tvarovací filtr je možné použít dvěma způsoby. Zapojením v otevřené smyčce (viz obrázek výše nahoře) je modifikován referenční signál přicházející od obsluhy nebo od generátoru trajektorie z vyšší úrovně řízení. Výhodou tohoto uspořádání je, že dynamika vlastního filtru neovlivňuje chování podřízené zpětnovazební smyčky. Podmínkou správné funkce je korektní nastavení regulátoru C(s) ve zpětné vazbě, který musí pracovat v lineárním režimu. V opačném případě může dojít ke zkreslení frekvenčního spektra akční veličiny a tím k vybuzení nežádoucích kmitů na rezonančních frekvencích stroje (ve schématu P(s)). Záporem přímovazebního zapojení je absence tlumení při působení vnějších poruch. Tuto nevýhodu odstraňuje zapojení v uzavřené smyčce (na obrázku dole), kdy filtr je umístěn za zpětnovazební regulátor a tvaruje přímo akční veličinu. V této variantě jsou kompenzovány vibrace vybuzené jak v důsledku změny referenčního signálu tak vlivem působících vnějších poruch. Nevýhodou tohoto zapojení je zanesení dynamického zpoždění do zpětné vazby a tím nutnost přeladit vnitřní regulátor.
Vlastní algoritmus filtrace lze popsat v časové oblasti vztahem
Filtr má tedy strukturu sumy vážených dopravních zpoždění kde zesílení A1..A4 a hodnoty zpoždění t1..t4 závisí na volbě typu filtru, frekvenci a tlumení kmitavého módu systému. Výhodou uvedené struktury oproti klasickým dynamickým notch filtrům užívaným v regulační technice je konečná impulzní odezva, která je důležitá zejména v aplikacích řízení pohybu, zaručená stabilita a monotónní přechodová charakteristika filtru a obecně menší zpoždění zaváděné do cesty signálu.
Pro správnou funkci filtru je třeba zadat vlastní frekvenci omega a tlumení xi kmitavého módu, který má být potlačen. Parametr ipar pak udává typ tvarovacího filtru, pro ipar=1 je použit jeden z deseti základních filtrů, které se volí parametrem istype. Jednotlivé typy se liší tvarem frekvenční charakteristiky a šířkou nepropustného pásma. Při přesné znalosti omega a xi je vhodný filtr typu ZV nebo ZVD (Zero Vibration), které dosahují nejrychlejší odezvy na vstupní signál. Při velké neurčitosti v modelu systému/signálu lze použít robustní filtry UEI (Extra Insensitive) nebo UTHEI, které dosahují velké šířky nepropustného pásma za cenu delší odezvy filtru. Číslo na konci názvu filtru odpovídá maximální přípustné procentuální úrovni vybuzených vibrací pro dané omega a xi (jedno, dvě nebo pět procent).
Pro jemné ladění filtru lze použít kompletní parametrizaci volbou ipar=2, pro kterou se zpřístupní volné parametry p_alpha,p_a2 a p_a3. Ty určují tvar frekvenční charakteristiky filtru a lze je použít pro nalezení optimálního kompromisu mezi robustností a zavedeným zpožděním.
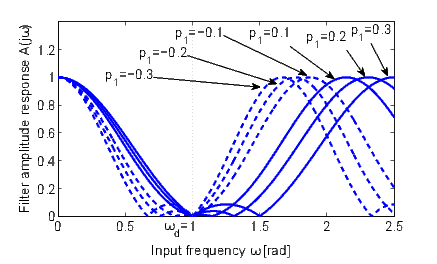
Parametr asymetrie p_alpha určuje relativní polohu sedla nepropustné oblasti frekvenční charakteristiky filtru vzhledem k nastavené frekvenci omega. Kladná hodnota znamená posun vpravo do oblasti vyšších frekvencí, záporná do opačného směru, nulová hodnota vede na symetrickou charakteristiku (viz obrázek výše). S parametrem p_alpha souvisí také délka filtru, tedy celkové zpoždění zavedené do cesty vstupního signálu, obecně menší hodnota znamená pomalejší filtr s větším zpožděním. Asymetrické filtry jsou vhodné v případech, kdy frekvence, která má být tlumena je proměnná a pohybuje se v určitém intervalu nad nebo pod nominální známou hodnotou, přičemž vyšší pravděpodobnost se předpokládá na jednom z okrajů intervalu (asymetrická hustota pravděpodobnosti).
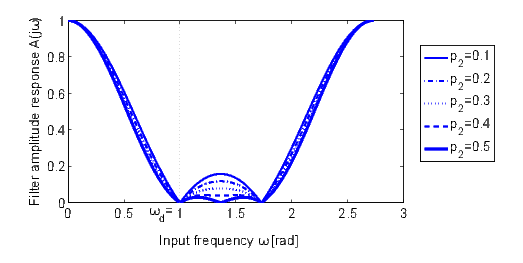
Parametr necitlivosti p_a2 určuje šířku a úroveň útlumu nepropustného pásma filtru. Větší hodnota znamená širší nepropustnou oblast s větším tlumením. Pro praktické aplikace je doporučeno nastavit hodnotu p_a2=0.5 pro maximální robustnost tvarovacího filtru vůči chybě v modelu systému/signálu.
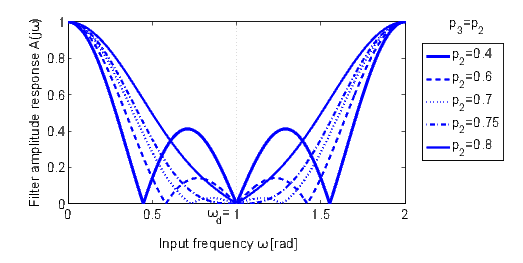
Doplňkový parametr p_a3 je nutné nastavit pro symetrické filtry (volba p_alpha=0). V tomto případě je pro praktické použití vhodné volit shodné hodnoty p_a2=p_a3 na intervalu <0,0.75>. Menší hodnoty vedou na rychlejší filtry s úzkým nepropustným pásmem, větší pak na robustní tvarovače s širokým pásmem útlumu a delší odezvou (viz obrázek).
Vstup
u | Vstupní signál filtru | Double (F64) |
Výstupy
y | Filtrovaný výstupní signál | Double (F64) |
E | Příznak chyby | Bool |
|
|
|
Parametry
omega | Vlastní frekvence ⊙1.0 | Double (F64) |
xi | Součinitel relativního tlumení | Double (F64) |
ipar | Specifikace ⊙1 | Long (I32) |
|
|
|
istype | Typ ⊙2 | Long (I32) |
|
|
|
p_alpha | Asymetrie tvarovače ⊙0.2 | Double (F64) |
p_a2 | Necitlivost ⊙0.5 | Double (F64) |
p_a3 | Přídavný parametr (pouze pro p_alpha=0) ⊙0.5 | Double (F64) |
nmax | Délka vyrovnávací paměti (počet vzorků). Používá se pro interní alokaci paměti. ↓10 ↑10000000 ⊙1000 | Long (I32) |
[Předchozí] [Na začátek] [Výše]
2020 © REX Controls s.r.o., www.rexygen.com