Ovladač CanDrv systému REXYGEN
Uživatelská příručka
Plzeň
15.12.2023
Obsah
1.1 Úvod
1.2 Požadavky na systém
1.3 Instalace ovladače
2 Zařazení ovladače do projektu aplikace
2.1 Přidání ovladače CanDrv do projektu
2.2 Připojení vstupů a výstupů do řídicího algoritmu
3 Konfigurace ovladače
3.1 Konfigurační dialogové okno
4 Stručný popis sběrnice CAN
5 Stručný popis protokolu CANopen
6 Formát konfiguračního souboru
7 Poznámky k implementaci
8 Co dělat při problémech
Literatura
Kapitola 1
Ovladač CanDrv a systém REXYGEN
1.1 Úvod
V této příručce je popsáno používání ovladače CanDrv pro připojení technických prostředků využívajících protokol CAN a CANopen k řídicímu systému REXYGEN pro Windows, Linux, Linux/XENOMAI. Je podporována varianta CAN 1.0 i CAN 2.0 (tj. Message ID 11 i 29 bitů). Ovladač umožňuje získávat vstupy a nastavovat výstupy a to jak v režimu PDO tak i SDO. Ovladač byl vyvinut firmou REX Controls.
Ačkoliv CANopen má architekturu producent-konzument, některé funkce (například download konfigurace, přepínání stavu sítě) řídí jen jedna stanice v síti a v dalším textu bude označována Master zatímco ostatní stanice budou označovány Slave.
1.2 Požadavky na systém
Obecně lze říci, že pro použití ovladače CanDrv musí být dodrženy minimální požadavky nutné k provozování řídicího systému REXYGEN. Pro konfiguraci ovladače postačuje běžný počítač PC (případně v průmyslovém provedení). Pro provozování ovladače na cílovém zařízení je potřeba speciální komunikační karta.
Ovladač vyžaduje komunikační kartu firmy PEAK (varianta pro sběrnici USB, PCI, miniPCI, PCIexpress). Komunikační karty jiných výrobců nejsou podpořeny, ale v případě požadavku je možné jejich podporu doimplementovat.
Pro systém Windows a Linux/Debian je potřeba nainstalovat ovladač komunikační karty do jádra systému (viz webové stránky dodavatele nebo instalační CD dodávané s komunikační kartou). Pro systém GNU/Linux je nutno nainstalovat balíček kmod-peak-linux-driver.
Aby bylo možno ovladač využívat, musí být na vývojovém (konfiguračním) počítači a na cílovém zařízení (počítači) nainstalováno programové vybavení:
|
Vývojový počítač |
|
|
Operační systém |
jeden ze systémů: Windows 10/11, GNU/Linux |
|
Vývojové nástroje |
verze REXYGEN pro daný operační systém |
|
Cílové zařízení |
|
|
Řídicí systém REXYGEN |
verze pro zvolené cílové zařízení s jedním z podporovaných operačních systémů: Windows 10/11, GNU/Linux |
|
|
|
|
|
|
V případě, že vývojový počítač je přímo cílovým zařízením (řídicí systém REXYGEN bude provozován v jedné z variant Windows), instaluje se pouze jedna kopie řídicího systému REXYGEN.
1.3 Instalace ovladače
Pro operační systém Windows se ovladač CanDrv instaluje jako součást instalace řídicího systému REXYGEN. Pro nainstalování ovladače je nutné v instalačním programu systému REXYGEN zaškrtnout volbu Ovladač protokolu CAN. Po typické instalaci se řídicí systém REXYGEN nainstaluje do cílového adresáře C:\Program Files\REX Controls\REX_<version>, kde <version> označuje verzi systému REXYGEN.
Po úspěšné instalaci se do cílového adresáře zkopírují soubory:
- CanDrv_H.dll – Konfigurační část ovladače CanDrv.
- CanDrv_T.dll – Cílová část ovladače CanDrv spouštěná exekutivou RexCore. Tato verze se používá pokud na cílovém zařízení běží operační systém Windows 10/11. Pro jinou cílovou platformu je na ni třeba nainstalovat příslušnou verzi systému REXYGEN.
- DOC\CanDrv_CZ.pdf – Tato uživatelská příručka.
Pro operační systém Linux je potreba nainstalovat balíček rex-candrvt.
Ve všech případech je na cílový počítač potřeba nainstalovat ovladač komunikační karty (viz výše).
Kapitola 2
Zařazení ovladače do projektu aplikace
Zařazení ovladače do projektu aplikace spočívá v přidání ovladače do hlavního souboru projektu a z připojení vstupů a výstupů ovladače v řídicích algoritmech.
2.1 Přidání ovladače CanDrv do projektu
Přidání ovladače CanDrv do hlavního souboru projektu je znázorněno na obr. 2.1.
Pro zařazení ovladače do projektu slouží dva zvýrazněné bloky. Nejprve je na výstup Modules bloku exekutivy EXEC připojen blok typu MODULE s názvem CanDrv, který nemá žádné další parametry.
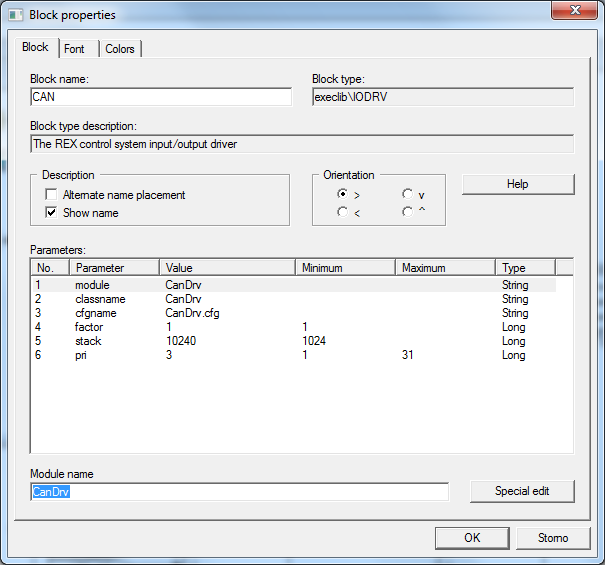
Druhý blok CAN typu IODRV, připojený na výstup Drivers exekutivy má parametry:
- modul – jméno modulu ovladače, které se pro tento ovladač zadává: CanDrv
- classname – jméno třídy ovladače, které se pro tento ovladač zadává: CanDrvPOZOR! Jméno rozlišuje velká a malá písmena!
- cfgname – jméno konfiguračního souboru ovladače. Vytváření konfiguračního souboru je popsáno v kapitole 3. Doporučeno je zadávat jej ve tvaru <jméno_třídy>.rio, kde přípona .rio (Rex Input Output) byla zavedena pro tento účel.
Jménem tohoto bloku, na obr. 2.1 zadaným jako CAN, začínají názvy všech vstupních a výstupních signálů připojených k tomuto ovladači.
Ovladač CanDrv podporuje i úlohy běžící synchroně s komunikací. To se provede tak, že místo bloku typu IODRV se použije blok typu TIODRV (který má stejné parametry jako IODRV) a na jeho výstup Tasks připojíme blok typu IOTASK (má analogické parametry i význam jako blok typu TASK). Ovladač potom funguje tak, že odešle SYNC zprávu/packet (popř. čeká na přijetí SYNC zprávy/packetu), spustí algoritmus definovaný blokem IOTASK, odešle všechny synchronní PDO a čeká na další periodu.
Právě popsané parametry bloku IODRV se konfigurují v programu REXYGEN Studiov dialogovém okně, jak je patrno z obr. 2.2 a). Konfigurační dialog ovladače CanDrv, popsaný v kapitole 3, se aktivuje po stisku tlačítka Special Edit.
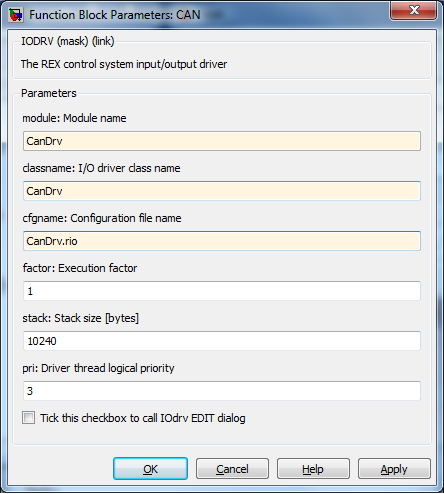
V programovém systému Matlab Simulink se parametry bloku IODRV zadávají v parametrickém dialogu znázorněném na obrázku 2.2 b). Poslední parametr slouží k volání konfiguračního dialogu ovladače přímo z prostředí programu Matlab Simulink. Okamžitě po zaškrtnutí tohoto políčka bude zavolán konfigurační dialog ovladače CanDrv popsaný v kap. 3.
2.2 Připojení vstupů a výstupů do řídicího algoritmu
Vstupy a výstupy z ovladačů se připojují do souborů s příponou .mdl jednotlivých úloh. V hlavním souboru projektu jsou soubory úloh uvedeny pouze odkazem v blocích typu QTASK nebo TASK, popř. IOTASK připojovaných na výstupy QTask, Level0,…, Level3 exekutivy. Pro připojení vstupů a výstupů z ovladače CanDrv do řídicího systému REXYGEN lze použít bloky, znázorněné na obr. 2.3.
Blok typu From sloužící pro připojení jednoho vstupu má parametr GotoTag roven CAN__<IN>, blok typu Goto používaný pro připojení jednoho výstupu má tento parametr nastaven na CAN__<OUT>, kde <IN> a <OUT> jsou řetězce odkazující na object dictionary (viz dále). Všechny řetězce používané jako odkazy na data poskytovaná a přijímaná ovladačem CanDrv mají přímo na svém začátku prefix CAN povinně následovaný dvěma znaky _ (podtržítko).
Přesněji řečeno, daný vstupně výstupní blok je považován systémem REXYGEN za blok připojený k ovladači CanDrv, pokud jeho jméno (či, v případě bloků typu From a Goto, parametr Goto tag) začíná jménem bloku typu IODRV popisujícího daný ovladač. Na obr. 2.1 to byl právě blok CAN. Začátek jména vstupního nebo výstupního bloku je od zbytku jména vždy povinně oddělen dvěma znaky _.
Kdyby byl např. blok CAN z obr. 2.1 přejmenován na XY, začínala by jména všech vstupně výstupních bloků připojených k ovladači CanDrv znaky XY__. Z praktických důvodů je však rozumnější volit prefix mnemotechnicky blízký názvu ovladače.
Zbytek jména vstupního nebo výstupního bloku je odkaz do object dictionary (viz dále) a má následující strukturu:
I<index>S<subindex>
kde <index> a <subindex> jsou čísla definující objekt v object dictionary, jehož hodnotu čteme/zapisujeme. Je možné číst/zapisovat další pomocné signály k danému objektu. To se provede přidáním přípony do názvu. Možnosti jsou:
- _RE – povolení čtení po sběrnici CAN.
- _WE – povolení zápisu po sběrnici CAN.
- _Fresh – udává počet sekund od poslední změny hodnoty (resp. kdy naposledy přišla hodnota po sběrnici CAN - hodnota se nemusela změnit).
Dále existují speciální symboly:
- Status – Stav stanice. Možné hodnoty jsou:
0 neexistující stanice (není v konfiguraci), 1 neznámý stav (stanice neodpovídá), 2 init (po zapnutí napájení), 3 preop (lze posílat SDO, ale PDO se neposílají a neakceptují), 4 stop (jako stav PREOP, ale aplikace může reagovat jinak), 5 operational(stanice plně funkční) - Node<nodeID> – Stav vzdálené stanice, jejíž číslo je <nodeID>. Hodnoty jsou stejné jako v předchozím případě.
- RecvMsg – V režimu CAN (tj. nikoliv CANopen obsahuje celou přečtenou zprávu. Je
potřeba použít blok INQUAD a potom:
y0 message ID y1 délka dat v byte(tj. 0 až 8; -1 značí žádnou příchozí zprávu), y2 první 4 byte dat (tj. 1. až 4. byte), y3 druhé 4 byte dat (tj. 5. až 8. byte), Pro příjem více zpráv zároveň lze použít symboly RecvMsg1, RecvMsg2, atd.
- SendMsg – V režimu CAN (tj. nikoliv CANopen obsahuje celou odesílanou zprávu. Je
potřeba použít blok OUTQUAD a potom:
u0 message ID u1 délka dat v byte(tj. 0 až 8; -1 značí žádná odesílaná zpráva), u2 první 4 byte dat (tj. 1. až 4. byte), u3 druhé 4 byte dat (tj. 5. až 8. byte), Pro odeslání více zpráv zároveň lze použít symboly SendMsg1, SendMsg2, atd.
Použití bloků From a Goto pro vstup a výstup jednoho signálu do/z řídicího algoritmu umožňuje snadno přecházet ze simulační verze algoritmu testované v systému Matlab Simulink do systému reálného času REXYGEN. V systému Simulink je možno k blokům From a Goto přiřadit „protikusy“, kterými bude připojen simulační model procesu, po otestování může být model procesu z projektu odstraněn. Při překladu modelu nahradí díky zavedené a právě popsané konvenci systém REXYGEN zbylé bloky From a Goto vstupními a výstupními bloky.
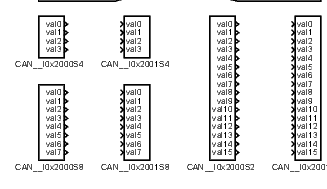
Protože ovladač umožňuje pod jedním symbolickým jménem získávat několik vstupů či nastavovat několik výstupů, lze s výhodou používat bloky čtyřnásobných, osminásobných a šestnáctinásobných vstupů a výstupů (INQUAD, OUTQUAD, INOCT, OUTOCT a INHEXD, OUTHEXD), viz obr. 2.3. V tomto případě je v názvu bloku odkaz na první požadovaný objekt a v následujících signálech jsou následující subindexy. Výhodou takového užití je zvýšení rychlosti a částečně i přehlednosti algoritmů. Přechod od simulační verze je však v takovém případě trochu pracnější. Podrobný popis vícenásobných vstupů a výstupů lze nalézt v příručce [1].
Kapitola 3
Konfigurace ovladače
Konfigurace ovladače spočívá ve vytvoření tzv. „object dictionary“. Specifikace CANopen definuje, že všechny parametry a předávané hodnoty jsou v tomto „object dictionary“. Musíme tedy definovat, které objekty naše zařízení obsahuje, jakou mají počáteční hodnotu a zda je lze číst/zapisovat z algoritmu systému REXYGEN a zda je lze číst/zapisovat po sběrnici CAN.
Obecný popis konfiguračního dialogového okna a postup při konfiguraci jednotlivých typů objektů je uveden v následujících sekcích této kapitoly.
3.1 Konfigurační dialogové okno
Zatím není implementováno. Lze pouze vygenerovat implicitní konfiguraci (což doporučujeme, protože se tím vytvoří všechny povinné objekty). Dále je nutné editovat přímo *.rio soubor v textovém editoru (viz 6).
Kapitola 4
Stručný popis sběrnice CAN
Sběrnice CAN je dvouvodičová sériová sběrnice na fyzické vrstvě podobná s dobře známou RS-485. Budiče jsou s tzv. otevřeným kolektorem, takže logická 0 „přetlačí“ logickou 1. Dále platí pravidlo, že stanice, která zjistí, že vysílá logickou 1 a na sběrnici je logická 0 musí okamžitě přestat vysílat a celou zprávu se pokusí vyslat znova po ukončení vysílání aktuální zprávy.
Vzhledem ke konečné rychlosti světla (šíření signálu v kabelu) a k požadavku kontroly kolize na každém bitu dostáváme omezení na celkovou délku kabelu. Pro zamezení odrazu signálu na konci vedení musí být kabel na obou koncích zakončen odporem rovnajícím se impedanci vedení (obvykle kolem 120ohm ). Vzhledem k maximálnímu proudu budičů je omezen počet zařízení na jednom kabelu na 32. Detailní informace o kabelech a konektorech jsou uvedeny ve specifikaci CAN (soubor 303_1v01070001.pdf).
Celá zpráva/packet posílaný po sběrnici CAN obsahuje číslo zprávy (tzv. Message ID někdy též označované COB-ID) a vlastní data, kterých může být 0 až 8 byte. Zpráva obsahuje ještě několik dalších bitů, které nejsou pro další výklad podstatné. Z výše uvedeného vyplývá, že zprávy s nižším Message ID mají vyšší prioritu. Pokud dále zajistíme, že každé Message ID vysílá nejvýše jedna stanice, nemůže dojít ke ztrátě dat z důvodu kolize na sběrnici.
Stanice dále může vyslat paket žádající o vyslání určité Message ID (to se ovšem v CanDrv nevyužívá).
Původní standard CAN1.0 zavádí 11-bitové Message ID, pozdější revize CAN2.0 dovoluje 11 i 29-bitové Message ID. 29-bitové Message ID lze použít jen pokud jej podporují všechny zařízení na sběrnici/kabelu.
Sběrnice CAN má architekturu producent-konzument, tj, každý packet/zprávu přijímají všechny stanice. Stanice však může mít zapnutý filtr (ovladač CanDrv to nevyužívá) a některé zprávy pak nepřijímá (resp. nepředává nadřízeným vrstvám). Na sběrnici existuje mechanismus potvrzování, takže vysílající stanice pozná, že zprávu nikdo nepřijal.
Kapitola 5
Stručný popis protokolu CANopen
CANopen definuje objekty, které jsou přístupné nadřízené vrstvě (obvykle cílové aplikaci). Objekty se adresují čísly 0 až 65535(0xFFFF). Jednotlivé objekty mohou být logická hodnota, celé i desetiné číslo, text nebo obecné pole bajtů (tzv. DOMAIN). Dále objekt může být pole nebo struktura výše uvedených typů. K jednotlivým prvkům se potom přistupuje pomocí subindexu, přičemž subindex 0 udává počet prvků. Tato struktura se nazývá Object Dictionary a platí následující pravidla:
| 0x0000 ... 0x0FFF | Reservováno pro definici typů; při komunikaci se nepoužívá |
| 0x1000 ... 0x1FFF | Mají přesně daný význam a definují zejména, jak se data (hodnoty objektů v Object Dictionary) předávají po sběrnici CAN mezi jednotlivými stanicemi. |
| 0x2000 ... 0x5FFF | mohou se libovolně použít aplikací |
| 0x6000 ... 0xFFFF | jsou definovány aplikačním profilem; pokud například zařízení podporuje profil DS402(servozesilovače, řízení motorů) pak je 0x6040 řídící slovo(s přesně daným významem jednotlivých bitů), 0x6063 aktuální poloha, atd. |
Povinná část obsahuje následující objekty(jde je o základní sadu; pozdější rozšíření specifikace doplňuje například objekty pro multiplexed-PDO nebo konzoli operačního systému):
| Index (hex) | Object type | Name | Data type | Acc | M/O |
| 1000 | VAR | device type | UNSIGNED32 | ro | M |
| 1001 | VAR | error register | UNSIGNED8 | ro | M |
| 1002 | VAR | manufacturer status register | UNSIGNED32 | ro | O |
| 1003 | ARRAY | pre-defined error field | UNSIGNED32 | ro | O |
| 1004 | - | reserved for compatibility reasons | - | - | - |
| 1005 | VAR | MESSAGE-ID SYNC | UNSIGNED32 | rw | O |
| 1006 | VAR | communication cycle period | UNSIGNED32 | rw | O |
| 1007 | VAR | synchronous window length | UNSIGNED32 | rw | O |
| 1008 | VAR | manufacturer device name | Vis-String | const | O |
| 1009 | VAR | manufacturer hardware version | Vis-String | const | O |
| 100A | VAR | manufacturer software version | Vis-String | const | O |
| 100B | - | reserved for compatibility reasons | - | - | - |
| 100C | VAR | guard time | UNSIGNED16 | rw | O |
| 100D | VAR | life time factor | UNSIGNED8 | rw | O |
| 100E | - | reserved for compatibility reasons | - | - | - |
| 100F | - | reserved for compatibility reasons | - | - | - |
| 1010 | ARRAY | store parameters | UNSIGNED32 | rw | O |
| 1011 | ARRAY | restore default parameters | UNSIGNED32 | rw | O |
| 1012 | VAR | MESSAGE-ID TIME | UNSIGNED32 | rw | O |
| 1013 | VAR | high resolution time stamp | UNSIGNED32 | rw | O |
| 1014 | VAR | MESSAGE-ID EMCY | UNSIGNED32 | rw | O |
| 1015 | VAR | Inhibit Time EMCY | UNSIGNED16 | rw | O |
| 1016 | ARRAY | Consumer heartbeat time | UNSIGNED32 | rw | O |
| 1017 | VAR | Producer heartbeat time | UNSIGNED16 | rw | O |
| 1018 | RECORD | Identity Object | Identity(23h) | ro | M |
| 1019 .. 11FF | - | reserved for future extension | - | - | - |
| 1200 .. 127F | RECORD | 1st to 128th Server SDO parameter | SDO Parameter(22h) | ro | O |
| 1280 .. 12FF | RECORD | 1st to 128th Client SDO parameter | SDO Parameter(22h) | ro | O |
| 1300 .. 13FF | - | reserved for future extension | - | - | - |
| 1400 .. 15FF | RECORD | 1st to 512th receive PDO Parameter | PDO CommPar(20h) | rw | M/O |
| 1600 .. 17FF | RECORD | 1st to 512th receive PDO mapping | PDO Mapping(21h) | rw | M/O |
| 1800 .. 19FF | RECORD | 1st to 512th transmit PDO Parameter | PDO CommPar(20h) | rw | M/O |
| 1A00 .. 1BFF | RECORD | 1st to 512th transmit PDO mapping | PDO Mapping(21h) | rw | M/O |
- PDO CommPar(20h)
1 UNSIGNED32 MessageID pokud je nahozen bit29 jde o 29bitové MessageID, pokud je nahozen bit31, MessageID je neplatné
2 UNSIGNED8 transmision type 1 až 240 posílá se cyklicky a synchroně se SYNC packetem, číslo značí po kolika SYNC packetech jdou data, ostatní jsou necyklické režimy (v CanDrv některé nefungují)
3 UNSIGNED16 inhibit time doba ve 100us po kterou je zablokováno vyslání PDO od jeho předchozího vyslání (tj. minimální perioda v necyklickém režimu)
4 UNSIGNED8 reserved -
5 UNSIGNED16 event timer v CanDrv se nepoužívá
- PDO Mapping(21h)
1 .. 40 UNSIGNED32 1st to 64th object to be mapped po řadě index(U16), subindex(U8), počet bitů v PDO(U8)
- PDO Parameter(22h)
1 UNSIGNED32 MessageID client->server -
2 UNSIGNED32 MessageID server->client -
3 UNSIGNED8 NodeID číslo stanice (NodeID), se kterou se komunikuje
6-255 SIGNED64 SDOmapping rozšíření REXYGEN - po rade perioda v milisekundách(U16), místní index(U16), vzdálený index(U16), místní subindex(U8), vzdálený index(U8)
Data mezi jednotlivými stanicemi se vyměňují buď mechanismem SDO(Service Data Object) nebo mechanismem PDO(Process Data Object). Mechanismus SDO funguje tak, že jedna strana (tzv. client) pošle dotaz, ve kterém je index a subindex objektu a pokud je to zápis, tak i zapisovaná hodnota. Druhá strana (tzv. server) přijme požadavek a odpoví požadovanou hodnotu (resp. zapíše hodnotu a pošle potvrzení) nebo chybový kód. Pokud se data nevejdou do jednoho packetu/zprávy (tj. pokud jsou delší než 4byte), rozdělí se na více zpráv. Message ID pro SDO zprávy definují objekty 0x1200 až 0x127F (každý objekt pro jednu stanici, tj. tímto způsobem lze komunikovat s až 128 stanicemi) pro server a 0x1280 až 0x12FF pro klienta.
Mechanismus PDO funguje tak, že data (opravdu jen vlastní data bez dalších údajů) z několika objektů jsou poskládána do jedné zprávy a odeslána. Přijímací strana pozná podle Message ID co je to za data a nastaví je do příslušných objektů (obecně i obvykle jsou to jiné objekty než na vysílací straně). Takovýchto PDO přenosů (vysílacích i přijímaných) může být definováno na každé stanici více (až 512 - viz popis object dictionary, ale některá zařízení podporují méně nebo je mají nastaveny napevno). Pro nastavení Message ID ,periody a dalších parametrů vysílaných PDO slouží objekty/parametry 0x1800 až 0x19FF, přičemž pořadí hodnot ve zprávě (tj. hodnoty kterých objektů z object dictionary se posílají) určují objekty/parametry 0x1A00 až 0x1BFF, tj. 1.PDO má parametry v objektu 0x1800 a přiřazení hodnot v objektu 0x1A00, 2.PDO má parametry v objektu 0x1801 a přiřazení hodnot v objektu 0x1A01, atd. Pro přijímaná PDO se totéž definuje v objektech 0x1400 až 0x15FF a 0x1600 až 0x17FF.
V předchozím textu bylo ukázáno, jak se v CANopen definují různé zprávy. V zásadě lze pro každý typ zprávy definovat Message ID libovolně, jen je potřeba dodržet pravidlo, že dvě stanice nesmí vysílat stejné Message ID. Aby se toto usnadnilo, jsou některé hodnoty pro daný účel dopručené/implicitní a některé zakázané. Situaci shrnuje následující tabulka:
| Typ zprávy | MessageID | poznámka |
| NMT | 0 | nelze změnit |
| - | 1 | rezervováno pro pozdější použití |
| SYNC | 128(0x80) | lze změnit v objektu 0x1005 |
| EMERGENCY | 128(0x80)+<NodeID> | lze změnit v objektech 0x1014, 0x1015 |
| TIMESTAMP | 256(0x100) | lze změnit v objektech 0x1012, 0x1013 |
| - | 256(0x100)+<NodeID> | rezervováno pro pozdější použití |
| PDO1(tx) | 384(0x180)+<NodeID> | nastavení viz text |
| PDO1(rx) | 512(0x200)+<NodeID> | nastavení viz text |
| PDO2(tx) | 640(0x280)+<NodeID> | nastavení viz text |
| PDO2(rx) | 768(0x300)+<NodeID> | nastavení viz text |
| PDO3(tx) | 896(0x380)+<NodeID> | nastavení viz text |
| PDO3(rx) | 1024(0x400)+<NodeID> | nastavení viz text |
| PDO4(tx) | 1152(0x480)+<NodeID> | nastavení viz text |
| PDO4(rx) | 1280(0x500)+<NodeID> | nastavení viz text |
| SDO(tx) | 1408(0x580)+<NodeID> | rezervováno; nesmí se používat k jiným účelům |
| SDO(rx) | 1537(0x600)+<NodeID> | rezervováno; nesmí se používat k jiným účelům |
| - | 1760(0x6E0) | rezervováno pro pozdější použití |
| NMT Error | 1793(0x700)+<NodeID> | rezervováno; nesmí se používat k jiným účelům; |
| Control | lze změnit v objektech 0x1016, 0x1017 | |
| - | 2020(0x780) | reservováno pro pozdější použití |
| - | 2020(0x780)+<NodeID> | reservováno pro pozdější použití |
Detailní popis všech objektů, formát SDO packetů a pod. je ve specifikaci CANopen (v souboru 301_v04000201.pdf).
Kapitola 6
Formát konfiguračního souboru
Soubor *.rio je textový, takže jej lze v případě potřeby prohlížet i upravovat v libovolném textovém editoru pracujícím s prostým textem (například Notepad). Struktura souboru je zřejmá z následujícího příkladu:
NetAdapter "pcanpci0"
#NetAdapter "usb1"
NodeID 1
BaudRate 1000000
NodeMode 0x207
TimeoutSdo 0.2
Object {
Index 0x1000
Count 1
Entry {
Subindex 1
Flags 0x00000125
avi 0x6000
Value 301
}
}
Object {
Index 0x1280
Count 3
Entry {
Subindex 1
Flags 0x0000000D
avi 0x6000
Value 0x602
}
Entry {
Subindex 2
Flags 0x0000000D
avi 0x6000
Value 0x582
}
Entry {
Subindex 3
Flags 0x0000000D
avi 0x2000
Value 2
}
}
}
Platí, že parametry, jejichž název začíná znakem # jsou ignorovány a lze je tedy využít jako komentář. Sekce Object se opakuje tolikrát, kolik definujeme objektů/indexů v „object dictionary“. Obdobně sekce Entry se opakuje pro každý subindex. V názvech parametrů i sekcí se rozlišují velká a malá písmena.
Význam jednotlivých parametrů je následující:
- NetAdapter – Název komunikační karty v operačním systému. V Linuxu je to obvykle pcanpci0 pro PCI kartu a pcanusb0 pro USB kartu; ve Windows usb1 pro USB kartu.
- NodeID – Číslo stanice pro CANopen. Může nabývat hodnot 1 až 127.
- BaudRate – Rychlost sběrnice v bitech za sekundu. Všechny stanice na jedné lince musí mít nastavenu stejnou.
- TimeoutSdo – Doba v sekundách, jak dlouho se čeká na odpověď na SDO příkaz.
- NodeMode
– Upravuje některé vlastnosti ovladače. Každý bit představuje/zapíná
určitou vlastnost, přičemž:
bit 0 stanice má Master funkce (spouštění sítě, konfigurace stanic)
bit 1 synchronizace semaforem (lze pro urychlení vypnout, pokud všechny vstupy a výstupy do tohoto ovladače vedou jen z jemu přidruženému IOTASKu)
bit 2 Master stanice přejde do plného provozu i když nejsou k dispozici všechny nakonfigurované Slave stanice
bit 8 režim CAN (tj. bez CANopen vrstvy); celá konfigurace je ignorována a lze používat jen vstup RecvMsg a výstup SendMsg; v tomto režimu nelze použít IOTASK
bit 9 ve stavu preop se ignoruje, že Slave stanice neposílá stavové informace (tzv. heartbeat); odporuje to sice specifikaci CANopen, ale některá zařízení dokud nejsou nakonfigurována status neposílají
- Index – Číslo objektu v „object dictionary“
- Count – Počet subindexů objektu, tj. počet následujících sekcí Entry. Subindexy se nesmí vynechávat, takže je to současně nejvyšší subindex.
- Subindex – Číslo subindexu, který definuje tato sekce Entry.
- Flags – Upravuje některé vlastnosti položky. Každý bit představuje/zapíná
určitou vlastnost, přičemž:
bit 0 hodnota/subindex může být čten systémem REXYGEN bit 1 hodnota/subindex může být měněn/zapisován systémem REXYGEN bit 2 hodnota/subindex může být čten po sběrnici CAN bit 3 hodnota/subindex může být měněn/zapisován po sběrnici CAN bit 4 hodnota/subindex může být mapován do PDO bit 5 nastavuje se pokud, je jen jeden subindex a je považován za hodnotu celého objektu - avi – Typ hodnoty. Možnosti jsou:
0x1000 logická hodnota (on/off)
0x2000 BYTE/UNSIGNED8 - 8bitové číslo bez znaménka
0x3000 SHORT/SIGNED16 - 16bitové číslo se znaménkem
0x4000 LONG/SIGNED32 - 32bitové číslo se znaménkem
0x5000 WORD/UNSIGNED16 - 16bitové číslo bez znaménka
0x6000 DWORD/UNSIGNED32 - 32bitové číslo bez znaménka
0x7000 FLOAT/REAL32 - 4bajtové desetinné číslo (dle IEEE754)
0x8000 DOUBLE/REAL64 - 8bajtové desetinné číslo (dle IEEE754)
0xA000 LARGE/SIGNED64 - 64bitové číslo se znaménkem
0xC000 STRING - text
0xD000 INTPTR/DOMAIN - obecné pole bajtů (zadává se do uvozovek jako číslo v hexadecimálním formátu)
- Value – Vlastní (počáteční) hodnota subindexu. Formát musí odpovídat parametru avi.
Kapitola 7
Poznámky k implementaci
V této kapitole jsou soustředěny poznatky, které vznikly z dosavadních zkušeností. Některé položky v konfiguraci jsou často nesprávně pochopeny, ale podrobný popis výše by zhoršoval čitelnost textu. Proto jsou tyto postřehy uvedeny ve zvláštní kapitole.
- Někdy je potřeba číst/zapisovat hodnotu, která nejde namapovat do PDO.
Protože zvolená koncepce umožňuje předávat do výkresu jen hodnoty
z lokálního „object dictionary“ a nikoliv volat SDO, je potřeba hodnoty
z jiné stanice nějak přečíst. Za tím účelem byly do struktury SDO
client parameters (tj. do objektů 0x1280 až 0x12FF) přidány od subindexu
6 další parametry. Musí být typu UNSIGNED64 nebo SIGNED64 kde (od
nejvyšších bitů):
UNSIGNED16 perioda čtení/zápisu v milisekundách UNSIGNED16 index lokálního objektu UNSIGNED16 index objektu na vzdálené stanici UNSIGNED8 subindex lokálního objektu na vzdálené stanici UNSIGNED8 subindex objektu na vzdálené stanici S každou stanicí lze takto vyměňovat až 250 objektů pomocí SDO. Perioda je vlastně „ihibit time“, tj. dotazy se nevysílají častěji. Pokud je perioda krátká a dotazů hodně, bude skutečná perioda delší. Formát objektu/subindexu na vzdálené stanici se předpokládá stejný jako v lokálním objektu/subindexu.
- Pokud je potřeba konfigurovat PDO po síti (tj. nastavovat objekty 0x1400 až 0x1BFF) je potřeba vždy nejprve stanici přepnout do PREOP režimu, pak zakázat PDO(tj. v MessageID nastavit bit31), dále nastavit délku pole (tj. subindex 0) na 0, a pak změnit další prvky objektu. Nakonec nastavit správnou délku objektů a MessageID. Postup se může mírně lišit podle výrobce, ale pokud do těchto prvků (případně i jiných) nejde zapisovat, tak příčina je pravděpodobně jedna z výše uvedených.
- Implementace CANopen v systému REXYGEN nepodporuje TIME_SYNC (tj. přesnější synchronizaci) a nepodporuje multiplexed-PDO. SYNC packet je vysílán v každé periodě ovladače CanDrv . Režim Slave je podpořen, ale synchronizace na SYNC packet je jen přibližná (zprávy se vyčítají z komunikační karty s periodou, která je nastavena pro ovladač v systému REXYGEN a to je tedy i nepřesnost zasynchronizování).
- V případech, kde více objektů slouží ke stejnému účelu, se musí vždy použít první objekt z dané skupiny. Vždy tedy musí být použita dvojice 0x1800/0x1A00 pro odchozí PDO, 0x1400/0x1600 pro příchozí PDO, 0x1200 pro serverovská SDO a 0x1280 pro klientská SDO. Toto drobné omezení zjednodušuje implementaci.
- Zdá se, že pokud vyslanou zprávu žádná stanice nepřijme komunikační karta přejde do chybového stavu a za určitých okolností se již nevzpomatuje. Toto nastává pokud se připojují zařízení na sběrnici CAN „pod napětím“ popřípadě se každé zařízení zapíná a vypíná nezávisle. Podobná chyba také vzniká při různých komunikačních rychlostech. V takovém případě je nutné vše vypnout a zapnout pokud možno najednou nebo Master stanici jako poslední.
- V linuxu jsou podporovány 3 typy ovladačů:
raltime-char-device je podporovan jen v jadru s rozsirenim XENOMAI; pokud je spravne nainstalovan, zobrazuje se jeho název v /proc/rtdm/ (např. pcan0) a stejný náyev napíšeme do parametru NetAdapter v konfiguračním souboru char-device pokud je spravne nainstalovan, zobrazuje se jeho název v /dev/ (např. pcanpci0); do parametru NetAdapter jej píšeme s celou cestou (tj. např. /dev/pcanpci0); pokud není nainstalováno royšíření XENOMAI, lze psát i bez cesty (tj. např. pcanpci0). net-device pokud je spravne nainstalovan, zobrazuje jej příkaz ipconfig nebo ip link; do parametru NetAdapter píšeme zobrzený název (tj. např. can0) a navíc je v parametru NodeMode nastavit čtvrtý bit (přičíst 8). POZOR v závislosti na verzi kernelu v tomto režimu se nenastaví správně bitrate a je to potřeba z příkazové řádky před suštěním RexCore (příkaz má tvar ip link set can0 type can bitrate 125000 restart-ms 1000)
Kapitola 8
Co dělat při problémech
Nejčastější chyby jsou:
- Nezapojený ukončovací odpor.
- Rozdílná bitová rychlost u zařízení na jedné lince.
- Pokud se používá 29-bitové Message ID, existují zřejmě různé implementace takže se někdy stává, že je obráceně pořadí bitů (nejnižších 11bitů je na nejvyšších bitech MessageID). Pokud tedy zprávy nechodí, je vhodné toto zkontrolovat.
- Každý komunikační standard definuje, zda se pro přenos použije little-endian nebo big-endian formát. CANopen používá little-endian (tj. stejný jaký používají procesory Intel nebo ARM). Občas se stává, že na to vývojáři zapomenou a konverzi neprovádí (problém samozřejmě vzniká, pokud procesor je big-endian, tj. například Motorola nebo Siemens), takže vícebajtová čísla mají obráceně pořadí bajtů.
V případě, že daný ovladač CanDrvfunguje v jednoduchých testovacích příkladech správně a při potřebné konfiguraci nefunguje, prosíme o zaslání informace o problému (nejlépe elektronickou cestou) na adresu dodavatele. Pro co nejrychlejší vyřešení problému by informace by měla obsahovat:
- Identifikační údaje Vaší instalace – verzi, číslo sestavení (build), datum vytvoření instalace, licenční číslo.
- Stručný a výstižný popis problému.
- Co možná nejvíc zjednodušenou konfiguraci řídicího systému REXYGEN, ve které se problém ještě vyskytuje (ve formátu souboru s příponou .mdl).
- Konfigurační soubor ovladače CanDrv.
Literatura
[1] REX Controls s.r.o.. Funkční bloky systému REXYGEN – Referenční příručka, 2020. →.
Referenční číslo dokumentace: 15831
2023 © REX Controls s.r.o., www.rexygen.com